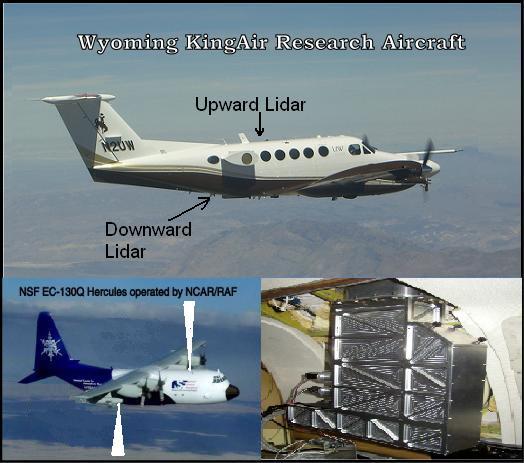
The Wyoming Cloud Lidar (WCL) is an airborne observational system for the study of cloud structure and composition. It is installed principally on the University of Wyoming King Air (UWKA), but can also be flown on the NSF/NCAR C-130 research aircraft. Operating at 355 nm (WCL-I) and 351 nm (WCL-II) wavelength, the lidar provides high spatial resolution cloud base measurements, as well as cloud and aerosol extinction coefficient and depolarization profiles. Coupled with the in situ observations of hydrometeors and air motions from the same aircraft these data yield unique information for analysis of cloud and precipitation processes.
The WCL may be made available to users of the UWKA or NSF/NCAR C-130 through the NSF allocation process or by special requests. Click here for an overview of the request process.
The lidars were developed by Remote Sensing Group in the University of Wyoming's Department of Atmospheric Science.
Major funding for the acquisition, development and research use of the WCL has been derived from NSF, ONR, NASA and UW.
The zenith-pointing WCL-I was developed in 2007 and has been successfully deployed
and tested on the UWKA during the Wyoming Airborne Integrated Cloud Observations Experiment
(WAICO) in 2008 and 2009, and on the NSF/NCAR C-130 during the Ice Clouds Experiment-Layer Clouds (ICE-L)
in 2007. Since then, it has been regularly deployed in in many projects aboard both aircraft.
The nadir-pointing WCL-II was developed in 2008 and successfully tested during the
WAICO09 experiments.
In 2011, the WCL-II was upgraded by adding two new receiving channels which can enlarge
the dynamic range of the receiving signals.
University of Wyoming - Flight Center, 2007: The University of Wyoming Cloud Lidar
(WCL). University of Wyoming, College of Engineering, Department of Atmospheric Science, doi:10.15786/M25W9D.
Format Citation (ReFindit). Download metadata: XML JSON
For further information concerning the WCL, please contact Matt Burkhart
An Ultra Pulsed Nd:YAG Laser from the Big Sky Laser Technologies Inc. providing a
20 Hz 16 mJ output at 355 nm is used for the WCL-I. Operating at 355 nm not only makes
it easy to achieve eye-safe operation, it also provides a stronger molecular backscattering
signal than a lidar operating at 532 or 1064 nm with the same laser energy. This is
important for calibrating backscattering coefficients. The laser beam is expanded
5 times to a diameter of 15 mm before emittance into the atmosphere, making the system
eye-safe beyond a distance of ~65 m. To improve lidar linear depolarization measurements,
a 1/2 λ wave plate is placed after the beam expander and coupled with a cubic polarization
beam splitter in the receiver path.
The receiver in the WCL-I is based on a 75mm refractive lens with a 12.5mm collimated
beam that enters into the cubic polarization beam splitter. The field of view is controlled
by a pinhole located at the focal plane of the receiving lens. The PMT packages include
narrow band filters (0.3 nm), a focus lens, and a compact PMT. To provide the ruggedness
and stability needed for the WCL to operate in a turbulent environment, the receiver
is designed to share the same optical bench with the transmitter. The PMT's gain can
easily be adjusted with bias control voltage. Signals from the PMTs are sent to the
LICEL data acquisition system. The data system has a combined A/D and photon counting
capability. To provide high-resolution spatial measurements, only strong signals digitized
by A/D at 40 MHz are saved at single shot or averaging of number of shots. Thus, the
WCL can provide measurements at ~4.5 m horizontal and 3.75 m vertical resolution from
the UWKA, for an average cruise speed of ~90 m/s.
Table of technical specifications for the WCL-I and II
| Platform |
|
|
| Zenith Lidar (WCL-I) | Nadir Lidar (WCL-II) | |
| Transmit Laser Wavelength | 355 nm | 351 nm |
| Pulse Energy | 16 mj | 200 μj |
| Pulse Length | 6 ns | 30 ns |
| Pulse Repetition Frequency (PRF) | 20 Hz | 1 KHz |
| Laser Beam Divergence | 1 mrad | 0.3 mrad |
| Polarization (pol) Radiated | Linear | Linear |
| Receiver Diameter | 75 mm | 108 mm |
| Receiver Field of View | 2 mrad | 1 mrad |
| Receiving Channels | 2 | 4 |
| Polarization Received | H&V | H&V |
| Detector | PMT | PMT |
| Range Resolution | 3.75 m and up | 1.5 m and up |
| Temporal Resolution | 0.05 s and up | 0.01 s and up |
| Data Acquisition System | LICEL | GAGE |
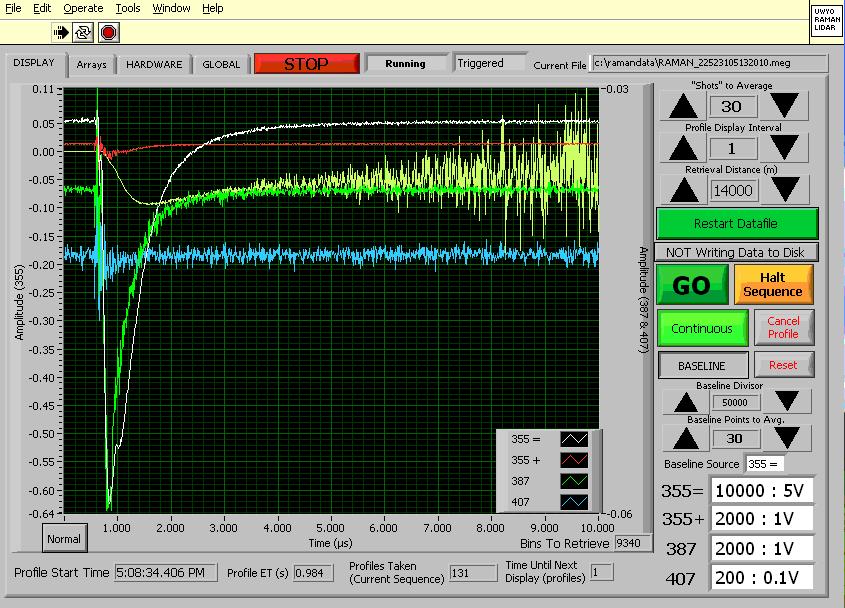
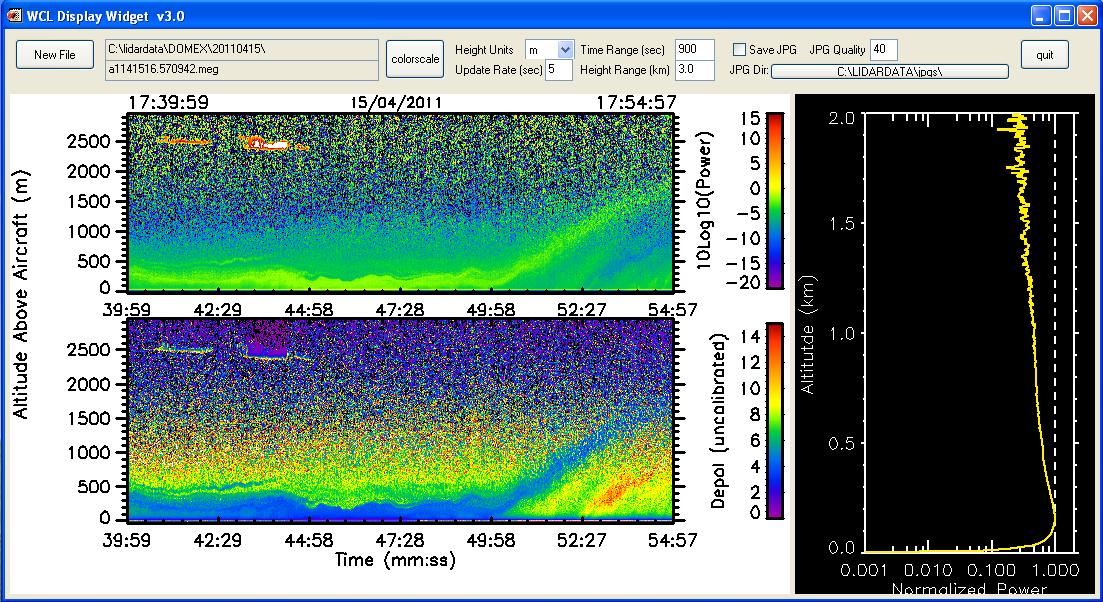
The WCL is software-controlled, with all output recorded in digital form by the Data
Acquisition System (DAQ). The WCL DAQ performs the following operations:
After a flight the raw data are archived in the native WCL format.
Post flight processing is available for:
The area around the flight level where the laser beam enters into the field of view
(FOV) of the receiving telescope progressively is the "overlap zone", which is about
100 m in length, depending on the transmitted laser beam divergence, the FOV of the
receiving telescope and the angle between the axes of the laser beam and telescope.
The processed data are already corrected for this by using calculated overlap factors.
However the correction may not be completely accurate for all of the profiles due
to the drift in the laser beam's direction.
Also, the near-range signals can saturate when the aircraft is flying through dense
clouds. In this situation, the clouds cannot be fully penetrated by the lidar, and
the signals can be dramatically attenuated with increasing distance.
The WCL data acquisition system uses GUIs for lidar control and data display, which connect to the data system server via a LAN.