A plant phenotyping project has been funded through the Wyoming Innovation Partnership Program that will equip the facility of a camera platform on a movable gantry system. Users will be able to record images to monitor plant photosynthetic efficiency, plant morphology and stress response.
The project is led by PhotosynQ, leader in providing phenotyping systems for both private corporations and research institutes. The proposed system will monitor multiple plants, in individual pots or flats, using a multimodal imaging platform on a XYZ robotic gantry. The base sensor platform will comprise: 1) a PAM fluorescence imaging system for tracking photosynthetic performance, 2) a high resolution RGB camera for visualizing plant color, morphology, and size, 3) a 3D imaging system for tracking height, growth, and architecture and 4) any accessory lighting required for each imaging method. The system will provide an integrated suite of software tools as requested for controlling the gantry, collecting data, processing image data, and analysis.
In May 2024, the PhotosynQ team visited our site for project updates of the Oqulus phenotyper and made time to have Dr. Cruz lead a hands-on workshop with activities and theoretical background information on image phenotyping. Over the two days, 35 students and faculty members from around campus and online learned about phenotyping leaf level measurements enabling future cross scale applications using the Oqulus system coming to our facility in 2025. Here the presentation with all background information and details on how to utilize chlorophyll a fluorescence data from high throughput measurements.
A greenhouse plant phenotyping system will be deployed starting in the Fall of 2023 in one of the large rooms at the Plant Growth & Phenotyping Facility at the University of Wyoming.
The project will be led by PhotosynQ, leader in providing phenotyping systems for both private corporations and research institutes. The proposed system will monitor multiple plants, in individual pots or flats, using a multimodal imaging platform on a XYZ robotic gantry. The base sensor platform will comprise: 1) a PAM fluorescence imaging system for tracking photosynthetic performance, 2) a high resolution RGB camera for visualizing plant color, morphology, and size, 3) a 3D imaging system for tracking height, growth, and architecture and 4) any accessory lighting required for each imaging method. The system will provide an integrated suite of software tools as requested for controlling the gantry, collecting data, processing image data, and analysis.
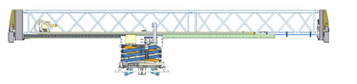
Figure 1: The proposed Gantry
Platform will have the following movement sensitivity:
X - axis: stroke = +/- 7.100 mm
Y - axis: stroke = +/- 5.300 mm
Z - axis: stroke = 1.000 mm
The system contains the following safety measures (security stops):
1) A first emergency stop is placed on the main electrical cabinet.
2) Safety bracket around the optical sensors (Figure 2), which will trigger an emergency stop on first contact with an obstacle
3) A dedicated security relay will controls all emergency stops and resets and will provide feedback to the robotics control system

Figure 2. The proposed system camera platform
PhotosynQ will install its proprietary, patented photosynthesis imaging system (oQulus, Figure 5) on the proposed gantry platform, which will perform PAM Chlorophyll a fluorescence measurements including: F0, Fm, F’, Fm’, F0’, Fv/Fm, Y(II), NPQ, ETR, as well as redox state (QL), & energy dissipation by an alternate methods (NPQt, qEt, and qIt). The oQulus system includes arrays of white (actinic) LED lighting and pulsed red (excitation) LED lighting required for the PAM fluorescence system and will accommodate plants no larger than 40 to 50 cm in diameter. Light insulating panels and baffles will be installed on the frame in addition to retractable light shields to exclude external lighting from the measuring field.
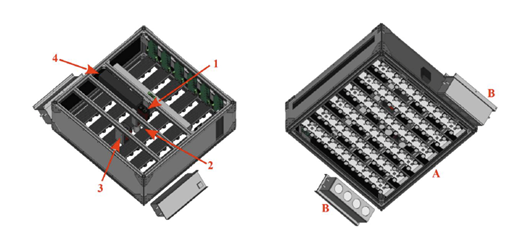
Figure 3. Light and cameras on the platform. PAM camera (1) RGB (2) Lasers (3 &4). A)White LED array, B) Diffuse halogen lighting
PhotosynQ will install a high resolution RGB 20 MP CMOS camera (20 MP, with 12 bit digital resolution, GigE vision interface [ethernet port]) into the oQulus canopy which will be used to supply the white LED lighting.
3D Laser Scanner - Low Range High Resolution
PhotosynQ will install a 3D red laser profile sensor to track plant growth and build abstract 3D models of plant architecture. Fixed within the oQulus canopy as a top view sensor, it will have an effective operating range of roughly 25 to 65 cm from the sensor platform with a field of view 15.8 to 36.5 cm wide and lateral resolution ranging between 0.15 to 0.3 mm and a vertical resolution between 0.055 and 0.2 mm. We note that selecting this option will limit the maximum measurable height of the plant to 40 cm.
PhotosynQ will provide an all-in-one control system software with a graphical user interface (Figure 6) for easy access and operation. The software will allow experimental design, plant positions for scanning, and scheduling experiment runs. The control software is easily extendable with the built in application programming interface (API) to add other additional sensors if required. It will also store the experiment's data and display the data using an API for data analysis and external storage.
Click on the images below to learn more about possible experimental data that will be available on our platform.


