Last Updated: 7/26/18
Teaching Standard:
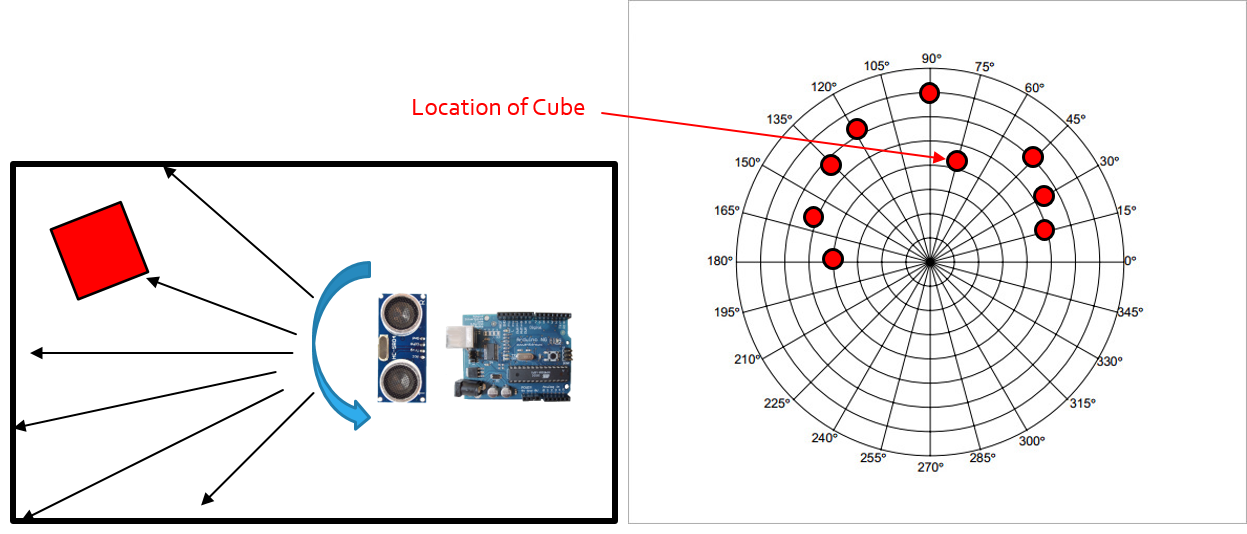
In this module, you will use an Arduino combined with a servo motor and an ultrasonic sensor to simulate a mining rescue. Imagine a scenario where a mine collapses, and there are miners stuck inside. To find the miners, you could use IR/Thermal cameras, but they can cost upwards to $5,000. To find the miners, we will use an ultrasonic sensor mounted to a servo. The servo will spin from 0 to 180 degrees, taking a distance reading every 15 degrees. Once the distances are found, you will graph the points on polar graph paper. The first scan will be of the inside of a box without any objects inside. The second scan will have an object placed somewhere in front of the sensor. To find the object, compare the two graphs and find the irregularity.
An ultrasonic sensor is a type of sensor that blasts out sound waves and times how long it takes those waves to return to the sensor. A distance can then be calculated in centimeters. Unfortunately, the sensors you will be using only can sense an object up to 200 centimeters away.
To use this module, place the circuit inside of a closed box with the back of the breadboard with the button and LED sticking out. Press the button to start the scan and the LED will illuminate. The servo will then move 15 degrees at a time and allow the ultrasonic sensor to take a distance reading. After each distance is found, the program will display the angle and the distance in the serial monitor. Once the scan is finished, the LED will turn off.
The presentation material can be downloaded at Mining Rescue.